

到年底了,务虚一下,畅想一下未来。有关自动驾驶、电动汽车和数据联网的事情,在通用汽车最新的一份报告里面写的比较有趣,我们摘录下来体会一下。

图1 Cruise automation和GM的分工
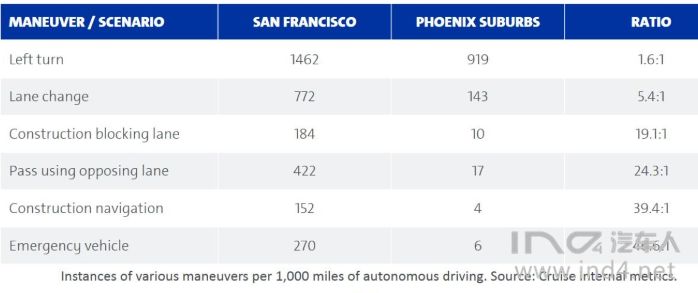
对于通用汽车来来说,之前花了很多的资金来收购Cruise automation,然后配置相应的电动汽车的工程团队对接,然后密歇根Orion的装配厂采用量产工艺制造自动驾驶汽车的公司。130辆搭载新一代自动驾驶技术的测试车在底特律附近的组装厂实现大规模量产,加入原先由50辆自动驾驶汽车组成的测试车队,在旧金山、亚利桑那州斯科茨代尔和密歇根州底特律市三地开展公共道路测试。
表1 测试的场景和动作
第一代测试车型如最右边的那样,有着较长的杆子顶着激光雷达,主要是采用分散布置的传感器的方式,是一个个手工凑上去的。所以整个布置,都是在原有的工程团队完全改装而成。
第二代测试车:转变设计思路,开始交给设计汽车的工程师设计的,从开始就考虑布置和系统的稳定性,也把对于整个自动驾驶的外置部分考虑设计验证的过程,并考虑大批量装配线中试生产,这样就可以得到如何量产的经验。在尽量可能的部分系统中使用车规级零部件和部件供应商来重建系统,修改和替换车内数十个系统和控制器上的代码,使其能与自动驾驶技术主要控制部分的计算系统衔接。在这代迭代中,考虑自动驾驶所需的所有关键组件,但没有冗余性和安全系统。
第三代测试车辆:如下图所示,我们可以来仔细看看整个系统,这里已经完成了深度的迭代,从系统上构建容错的电气、通信和驱动系统。
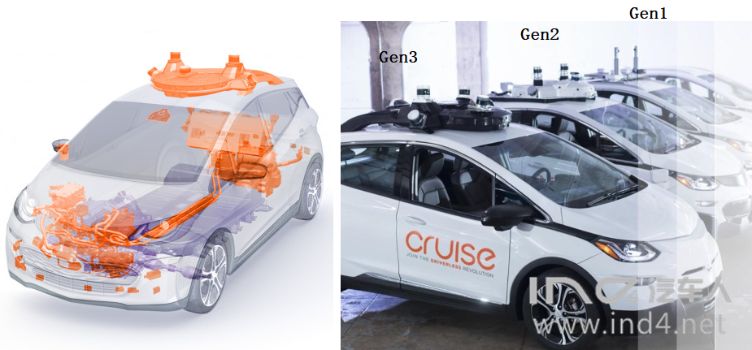
图2 三代Bolt EV为底子的自动驾驶车辆
自动驾驶主控系统:这是之前Cruise Automation最核心的部分,是构建在计算核心上的,目前给构建成一个大的方盒子,里面是个特别大的计算机和相应的软件部分。

图3 自动驾驶核心
在构建测试环境中,很重要的是非在线的仿真部分,一方面是为了在收集场景数据之后的复盘,也是在构建策略和学习过程中的重要的验证手段。
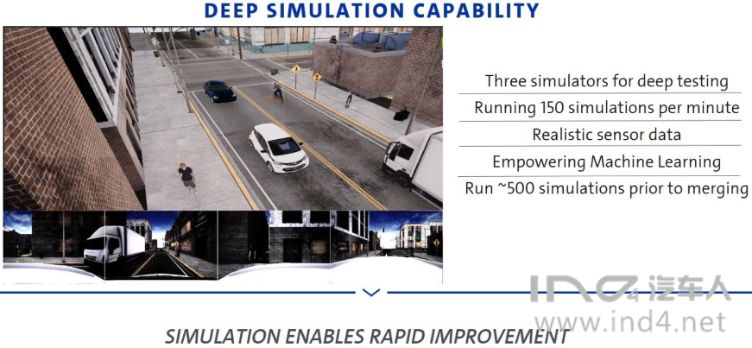
图4 深度仿真能力

图5 高精度地图
通用汽车收购激光雷达技术(LIDAR)公司——Strobe Inc,Strobe公司的工程师将加入通用汽车旗下Cruise Automation团队,一起定义和开发应用于自动驾驶汽车的下一代激光雷达解决方案,目标是把目前2万美金的拉到300美金^_^(将整个传感器做成单一芯片)。
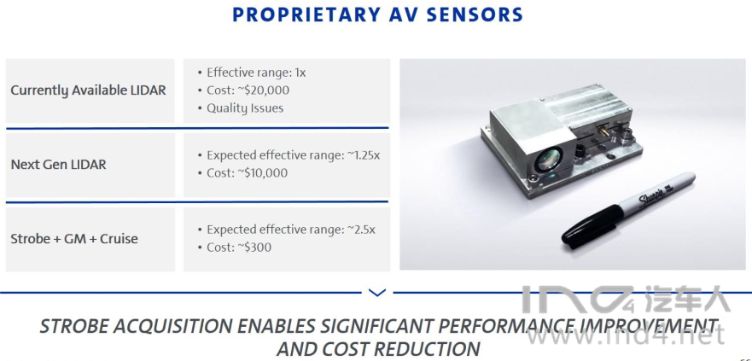
图6 激光雷达
整个感知系统主要包括:
l 5个激光雷达
l 14个摄像头环形分布
l 8个毫米波雷达进行各个方向测距
l 3个毫米波雷达对于转弯和侧方区域加强
l 原有1个超声波的雷达
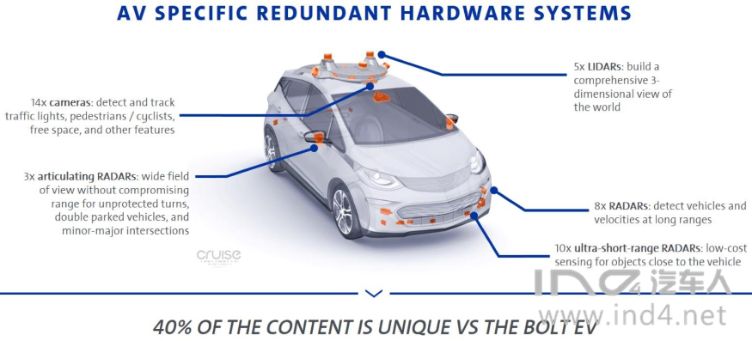
图7 感知系统的构成
这里采用了相似的DV验证来对自动驾驶系统进行验证,并实施了系统安全的分析方法,来构建与原有车辆系统兼容的安全设计理念。
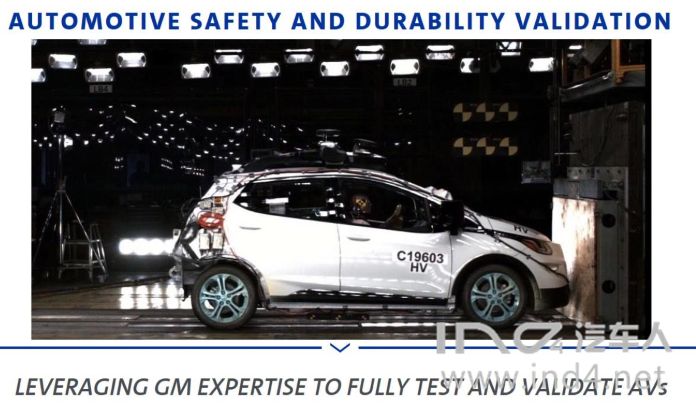
图8 系统安全性
这里主要是从车辆远程控制和系统总线的角度考虑的,由于整个联网的特性需求,使得车辆和后台是紧密联系起来,也增大了系统的信息安全的难度。从电气架构上,如下图所示,我们也看到大量的通信、电气和接口连接线束从车辆下部连接到了顶部的信息感知系统上,而车厢后部的计算系统则是整个自动驾驶车辆的核心区域。
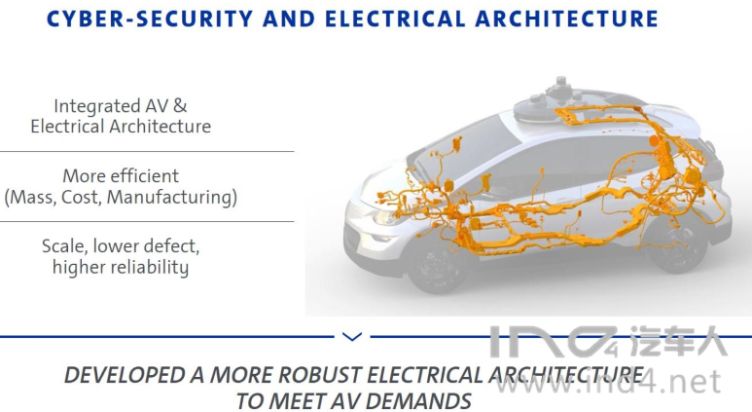
图9 电气架构和信息安全
由于自动驾驶处在原型测试期,用原有的Onstar车联系统就完全不够用了,特别是之前的计算系统的原始数据采集,所以采用了独立的数据收集系统,达到了200MB/s的存储和收集的能力,当然也构建了从原有Onstar获取车辆原有总线信息的能力。如下图所示,通过这些数据可以还原整个感知场景和车辆的运行情况。
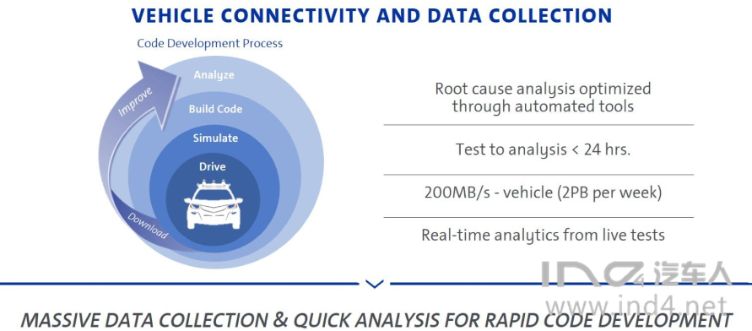
图10 车辆联网和数据收集
小结:搞这块的资源是技术和资金密集型的,我们看看就行了。
参考文件:
1)Changing the world with AV General motors





 扫一扫关注微信
扫一扫关注微信